

Institut für
OF Ostseefischerei
Projekt
OTC-SmartFishing
OTC-Smart Fishing - Sensorsystem für smarte Fischernetze
OTC-smartFishing entwickelte die Grundlagen für ein robustes Unterwasser- Kamerasystems mit KI-gestützter Bilderkennung für den Einsatz in der kommerziellen Fischerei und der Fischereiforschung. Damit wird es mittelfristig möglich zielgenau Meeresorganismen zu fangen - in der Fischerei und Fischerei-/Meeresforschung. Darüber hinaus ermöglicht dieses System eine ressourcenschonende, minimal-invasive Untersuchung der Fischfauna als Grundlage für eine nachhaltige Bewirtschaftung der Meere.
Das Projekt ist Teil des Clusterprojekts des Ocean Technology Campus Rostock.
Hintergrund und Zielsetzung
Das Ziel des Projekts war die Entwicklung eines optischen Unterwasser-Sensorsystems zur in-situ- Detektion und Klassifizierung von Meeresorganismen, das Anwendung in der Fischerei und meeresökologischen Forschung findet. Darüber hinaus sollte es auch die Basis für weitere Anwendungen und Technologie-Entwicklungen im Bereich Unterwassertechnik und Umweltmonitoring bilden. Im Rahmen des Projekts „OTC-smartFishing“ sollte durch die Projektpartner ein erster Prototyp entwickelt und im Fischereieinsatz getestet werden.
Die Notwendigkeit der Aufgabenstellung ergab sich, da unerwünschte Beifänge in der Fischerei zunehmend im besonderen gesellschaftlichen Fokus stehen. Bisher basieren Ansätze zur Beifangreduktion vor allem in der physikalischen Modifikation der Netze durch Ausnutzung der Körperform und Körpergröße (z.B. durch Maschengröße und Maschenform der Netze), bzw. durch Nutzung von Unterschieden im Verhalten der Arten im Netz. Diese Strategie zur Optimierung der Netzselektion hat jedoch - trotz jahrzehntelanger Forschung und Entwicklung - seine Grenzen. Das heißt, dass es neue Strategien braucht, um Arten und Größen effektiv zu trennen. Auch in der Fischerei- und Meeresforschung besteht das Ziel, die Anzahl der gefangenen Tiere zu reduzieren.
Bisher werden optische Verfahren wie Unterwasserfotos und -videos besonders an schwer zugänglichen Orten, wie Korallenriffen oder der Tiefsee, genutzt. Die Analyse erfolgt meist manuell, während KI-gestützte Bildanalyse noch in den Anfängen steckten. Erste Arbeiten zu kamerabasierten Analysen in Schleppnetzen wurden z.B. in Norwegen durchgeführt. Diese Ansätze waren jedoch z.B. aufgrund der Größe nur auf sehr wenigen Schiffen überhaupt einsetzbar.
Vorgehensweise
Zu Projektbeginn arbeiteten alle Projektpartner an der Erstellung des Lasten- und Pflichtenhefts sowie an der Konzeption der Hardware- und Softwarekomponenten. Neben den technischen Anforderungen an ein komplexes Kamerasystem, wurde im Projekt großes Augenmerk auf die mechanischen Anforderungen unter den extrem rauen Bedingungen in einem Schleppnetz an Deck und im Wasser gelegt. Hier wurde u.a. ein innovatives Konzept zum Einbau und zur Positionierung eines Kamerasystems in ein Schleppnetz erarbeitet.
Im Projekt konnte der entwickelte Prototyp erfolgreich auf mehreren Seereisen mit einem Fischereiforschungsschiff erprobt werden. Dabei konnte das System weiter verbessert werden, sowie Daten zur Verbesserung der KI-Modelle gewonnen werden.
Das Projekt wurde in vielfältiger Form der Öffentlichkeit im Rahmen von Vorträgen oder Medienberichten vorgestellt. Darüber hinaus fand eine der Seereisen unter Beteiligung von 10 Fischern aus Mecklenburg-Vorpommern statt, mit denen der Prototyp eingesetzt und diskutiert werden konnte.
Ergebnisse
Das Projekt konnte erfolgreich einen Prototyp des optischen Unterwasser-Sensorsystems zur in situ- Detektion und Klassifizierung von Meeresorganismen entwickeln und in der Praxis erproben.
Das Gesamtergebnis besteht dabei aus Hard- und Softwarekomponenten und annotierten Bilddatensätzen für die Weiterentwicklung von KI-Modellen. Darüber hinaus konnten wertvolle Erkenntnisse gewonnen werden, die für die Weiterentwicklung des Systems und künftige Entwicklungen der Projektpartner Anwendung finden können.
Das Herzstück des entwickelten Kamerasystem ist eine Unterwassereinheit mit innovativer Kamera und Beleuchtung. Dieses Kamerasystem bietet zusätzlich zum autonomen Betrieb der Unterwassereinheit auch die Möglichkeit der Kommunikation mit einer Überwassereinheit (Topside Unit). Dadurch ist es möglich sowohl die Videobilder der Unterwasserkamera(s) live an einen Computer an Bord zu übertragen, als auch die Kamera und die Lichter direkt zu steuern. Für die Kommunikation der Unterwassereinheit mit der Topside Unit war es notwendig eine vorhandene Winde aufwendig umzubauen.
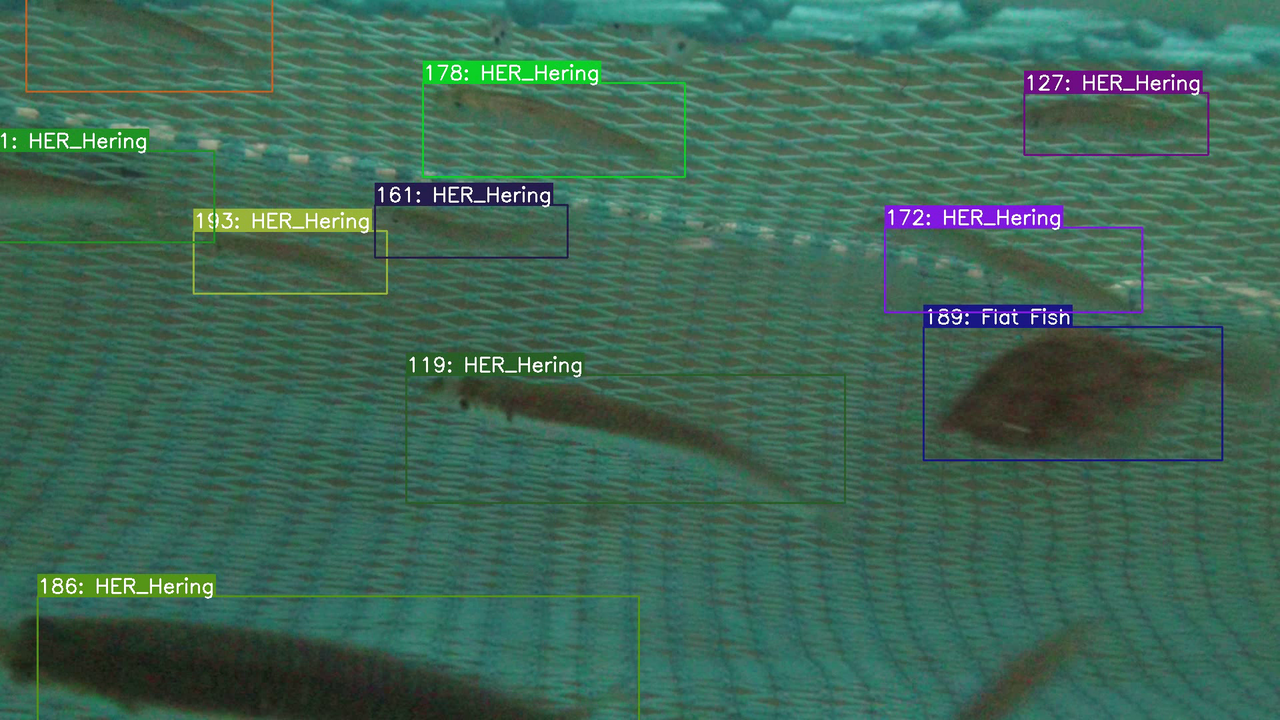
Im Projekt wurden verschiedene Software-Komponenten (Kamera-Node, Core-Node, KI-Node, User Interface) entwickelt und Objekterkennungs- und Tracking-Algorithmen für Fische in einem Schleppnetz erfolgreich implementiert. Durch den Einsatz des entwickelten Prototyps konnten auch wichtige Bilddatensätze mit Fischen in Schleppnetzen erstellt werden, die die Grundlage für weitere Verbesserungen und Entwicklungen von KI-Modellen sind.
Die entwickelten Softwarekomponenten sowie die Erkennungsalgorithmen sind umfassend nachnutzbar. In einigen Teilaspekten ist weiterer Forschungs- und Optimierungsbedarf vorhanden, der im Rahmen dieses Forschungsprojekts nicht im notwendigen Umfang realisierbar war. Die Ergebnisse des Projekts OTC-smartFishing bieten eine solide Grundlage für die nächste Phase des Zukunftscluster Ocean Technology Campus Rostock. Die Erkenntnisse über die Herausforderungen bei der Erkennung und Verfolgung von Fischen im Schleppnetz ermöglichen es, gezielt an bestehenden Problemen zu arbeiten.
Thünen-Ansprechperson

Thünen-Beteiligte
Beteiligte externe Thünen-Partner
- Fraunhoher-Institut für Graphische Datenverarbeitung (IGD)
(Rostock, Deutschland) - Framework Robotics
(Rostock, Deutschland) - FIUM GmbH & Co. KG
(Rostock, Deutschland) - Fraunhofer SOT (Smart Ocean Technologies)
(Rostock, Deutschland)
Geldgeber
-
Bundesministerium für Forschung, Technologie und Raumfahrt (BMFTR)
(national, öffentlich)
Zeitraum
10.2021 - 9.2024
Weitere Projektdaten
Projektfördernummer: 03ZU1107LA
Projektstatus:
abgeschlossen
Publikationen
- 0
Lansley J, Sala A, Stepputtis D, Brcic J, Einarsson HA, Feekings JP, Glemarec G, Hermann B, Kindt-Larsen L, Krishnan P, Ljungberg P, Melli V, Mytilineou C, Noack T, Perez Roda A, Richardson K, Yochum N (2023) ICES-FAO Working Group on Fishing Technology and Fish Behaviour (WGFTFB). Copenhagen: ICES, ix, 317 p, ICES Sci Rep 5(83), DOI:10.17895/ices.pub.24080889




