

Institut für
SF Seefischerei
Projekt
UFOTriNet - nachhaltiges Fischmonitoring in der Kieler Bucht: automatisiert, kontinuierlich und nicht-invasiv
Aufbau eines trilateralen Netzwerks für ein automatisiertes, kontinuierliches, nicht-invasives Monitoring von Fischbeständen durch Entwicklung eines mobilen und eines portablen Unterwasser-Fisch-Observatoriums (UFO) und deren Kopplung mit einem existierenden stationären UFO in der Kieler Bucht
Im Projekt „UFOTriNet” entwickeln Wissenschaftler ein Testnetzwerk aus stationären und mobilen Unterwasser-Fisch-Observatorien (UFOs) mit dem Ziel, die Vielfalt und Dichte von Fischpopulationen automatisiert und kontinuierlich überwachen zu können.
Hintergrund und Zielsetzung
Seit Jahren sind viele Fischbestände in fast allen marinen EU-Gewässern einschließlich Ostsee und Nordsee stark oder sogar überbeansprucht. Verantwortlich ist in erster Linie die starke Nachfrage und der damit verbundene wirtschaftliche Anreiz zur Steigerung der Fischproduktion. Die effiziente Umsetzung der EU-Meeres- und Fischereipolitik zur langfristigen und nachhaltigen Nutzung unserer marinen Ressourcen erfordert die Bereitstellung zeitlich und räumlich hochaufgelöster Daten über die Diversität von Fischarten, ihre jahreszeitliche Dynamik und über die kausalen Zusammenhänge mit ihrer belebten (biotischen) und unbelebten (abiotischen) Umwelt.
Im UFOTriNet-Projekt, einem deutschlandweiten Konsortium aus fünf Projektpartnern und über 20 Mitarbeitern verschiedenster Fachrichtungen, arbeiten wir in einem interdisziplinären Innovationsprojekt mit dem Ziel, ein automatisiertes, kontinuierliches und nicht-invasives Monitoring von Fischbeständen bereitzustellen.
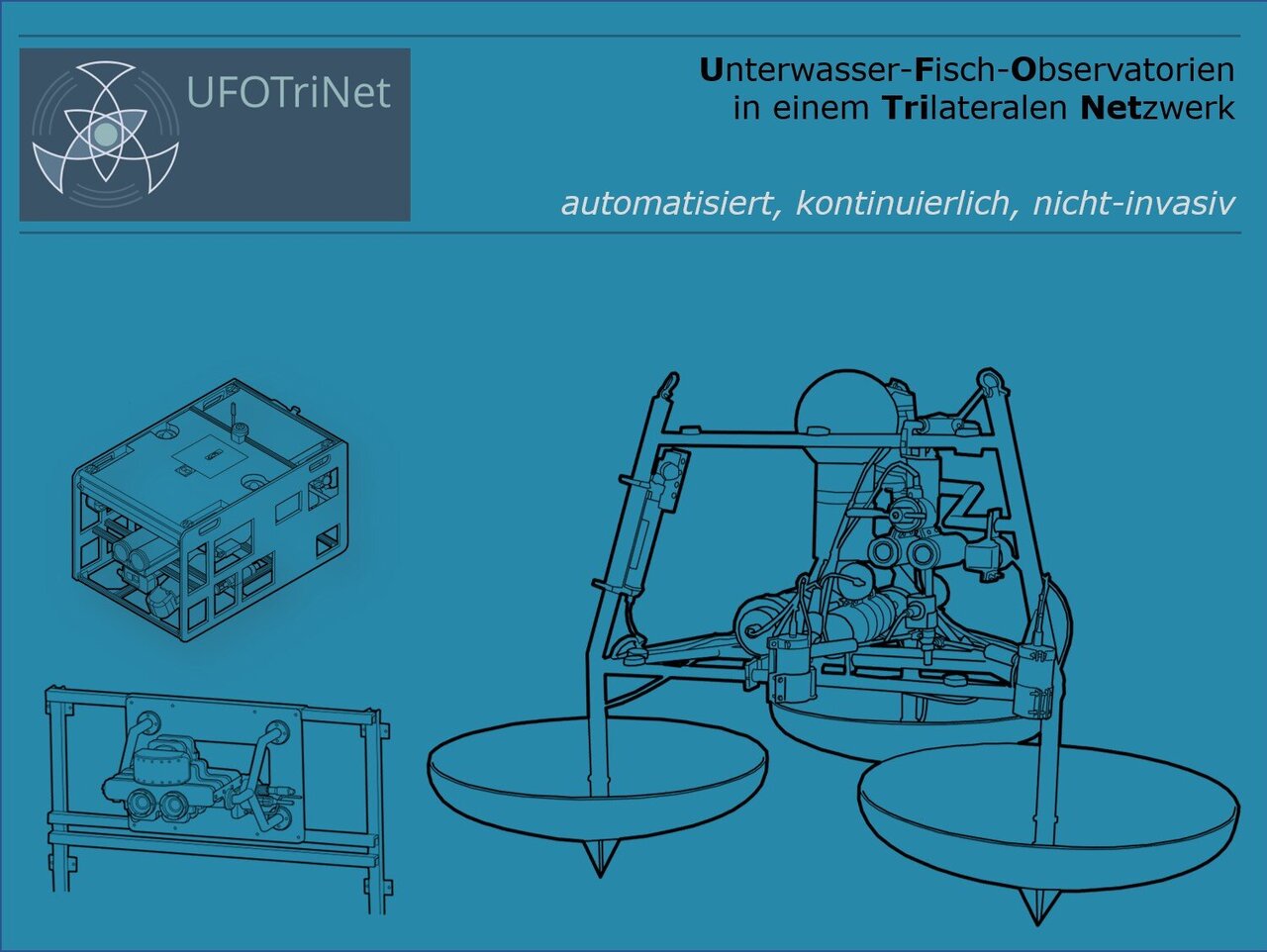
Zur Anwendung in unterschiedlichen Bereichen und zur Abdeckung unterschiedlicher Funktionen sind drei komplementäre Varianten an Unterwasser-Fisch-Observatorien („UFO“s) konzipiert und aus einem bereits bestehenden (stationären) Prototyp weiterentwickelt und gebaut worden: ein stationäres, ein portables und ein mobiles UFO. Alle drei Systeme sind modular mit dem gleichen Kernsatz an opto-akustischen Sensoren ausgestattet: einer Stereokamera und einem Sonargerät zum Monitoring von Fischen. Diese drei „UFO-Grundtypen” stellen die Eckpunkte des trilateralen Netzwerks dar, das im Rahmen von UFOTriNet in der Kieler Bucht getestet wurde.
Modularität, Kompaktheit, strukturelle Integrität und multiple Einsatzmöglichkeiten sind entscheidende Vorteile des trilateralen UFO-Arrays gegenüber der punktuellen schiffsbasierten Fischbestandsaufnahme. Die drei entwickelten UFO-Varianten sind frei kombinierbar und erlauben ein flächendeckendes Monitoring der Fischbestände als kostengünstige, standardisierte, umweltschonende und dauerhaft messende Alternative zur klassischen Fischbestandsaufnahme. Mittelfristiges Ziel ist die Autonomie der Systeme, u.a. durch die Erhöhung der Energieeffizienz und die Reduktion des Wartungsaufwandes insbesondere durch Nano-Beschichtung und UVC-LED Bestrahlung als neuartige Technologien zur Verhinderung biologischen Aufwuchses auf den Geräten.
Vorgehensweise
Im Fokus von UFOTriNet steht die Entwicklung und das empirische Testen innovativer nicht-invasiver Mess- und Kontrollsysteme – im Kern basierend auf bildgebender opto-akustischer Sensorik – zur synchronen und hochauflösenden Überwachung von Fischen und ihrer Umgebung. Um die Umgebung ebenfalls synchron zu überwachen, sind weitere Sensoren u.a. zur Messung von Temperatur, Salzgehalt, Druck, Sauerstoffgehalt, Chlorophyll, Trübung und Strömungen integriert worden. Ergänzende Forschungsaspekte sind die Optimierung der automatischen Fischidentifikation und Größenklassifikation auf Grundlage von KI-Algorithmen sowie die Autonomisierung u.a. durch Erhöhung der Energieeffizienz (LED-UVC-Experimente, Scheibenwischer) und Reduktion des Wartungsaufwandes (Nano-Antifouling-Beschichtung).
Die verschiedenen UFO-Systeme lassen sich in unterschiedlichen Gebieten oder für unterschiedliche Fragestellungen einsetzen. Dies ist der wichtigste Unterschied des UFO-Konzeptes gegenüber allen anderen Systemen weltweit.
Das stationäre und portable UFO (eine miniaturisierte Version des stationären UFOs) sind entweder für den Dauerbetrieb oder für den flexiblen Routinebetrieb – je nach Bedarf in vers. Schlüsselbereichen (z.B. marine Schutzgebiete, Laich-, Aufwuchs- oder Rekrutierungsgebiete, Windparks etc.) oder aber zur zeitweisen Anbindung (z.B. an Brückenpylonen, Felsen, Leuchttürmen oder Aquakulturanlagen) ausgelegt. Beide sind auf eine Landanbindung angewiesen. Das mobile UFOdagegen ist für kürzere ortsunabhängige Missionen konzipiert. Im ferngesteuerten oder autonomen Modus liefert es räumlich hochskalierte und flexible Beobachtungen und kann auch als begleitende Unterstützung von Fischereifahrzeugen oder Forschungsschiffen eingesetzt werden.
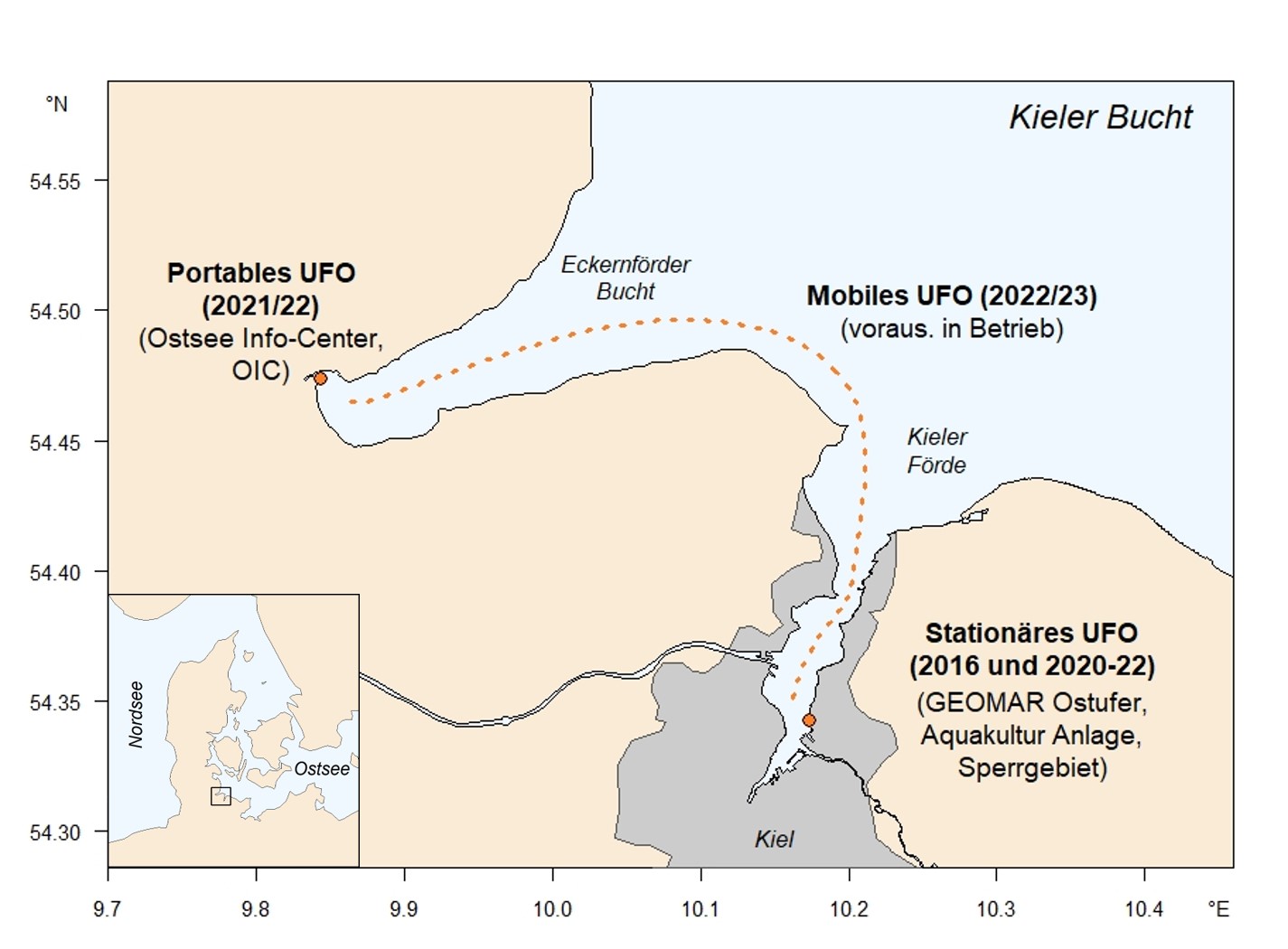
Im Rahmen des Testnetzwerks von UFOTriNet, wurde das stationäre UFO zur Datenaufnahme im Mai 2020 am Ostufer der Kieler Förde nahe der Aquakulturgesellschaft „Kieler Lachsforelle“ in ca. 5 m Tiefe ausgesetzt. Das portable UFO wurde im Juli 2021 in der Eckernförder Bucht am Ostsee-Info Center (OIC) in Betrieb genommen. Der eigentliche Geräteträger wurde an einer eigens dafür konstruierten und an die Spundwand des dortigen Hafenaußengeländes montierten Sprossenleiter befestigt. Eine erste Testfahrt des mobilen UFOs wurde im Juni 2022 in der Kieler Bucht durchgeführt.
Zusätzliche Beprobungskampagnen mit Forschungsschiffen dienten der Erhebung von Vergleichsdaten zur Kalibrierung, Verschneidung und Konvertierung und liefern zugleich wichtiges Prozessverständnis zur Entwicklung eines optimalen Hardware-Designs und zur Optimierung der Mustererkennungsalgorithmen sowohl der mobilen als auch der stationären Systeme.
Infolge gravierender Corona-bedingter Engpässe und Werkschließungen insbesondere während des Baus des mobilen UFOs wurde das Projekt um 12 Monate verlängert. Im Verlängerungszeitraum liegt der Fokus auf der finalen Fertigstellung, Erprobung des mobilen UFOs und die damit verbundene Datenerhebung und -analyse.
Daten und Methoden
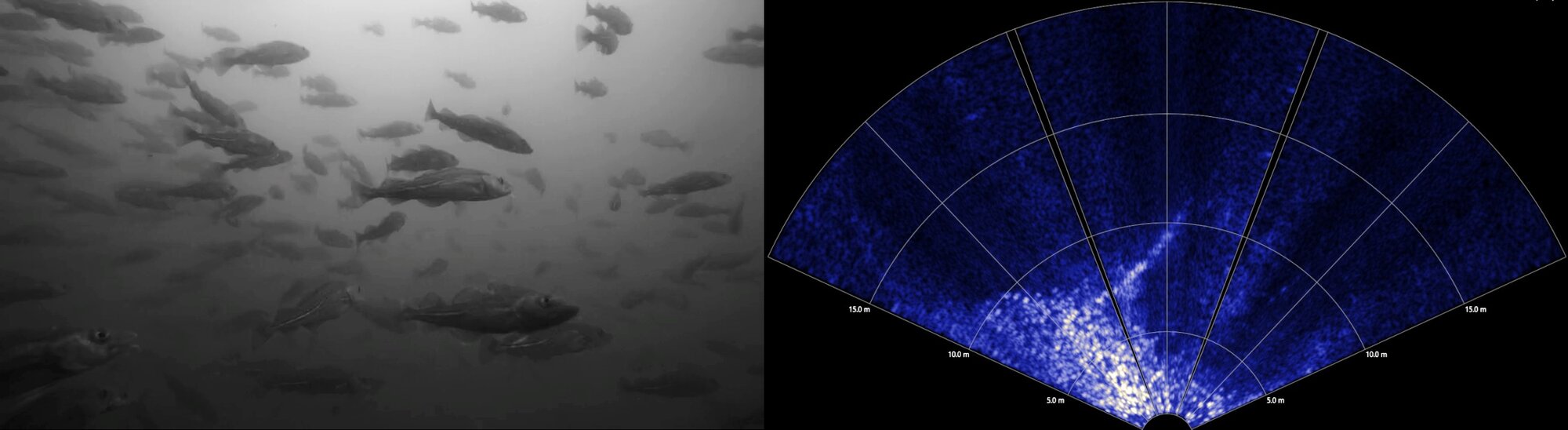
Alle drei UFO Systeme kombinieren moderne akustische und optische Verfahren (Mustererkennung) zur Überwachung von Fischbeständen. Dabei wird die im Überlappungsbereich liegende optische Nahfeld-Komponente als Unterstichprobe der räumlich weiterreichenden akustischen Fernfeld-Komponente betrachtet. Durch die Kopplung von optischem Nahfeld und akustischem Fernfeld können aussagekräftige Hybriddaten zur Verfügung gestellt werden. Die biologischen Hybriddaten aus Akustik und Stereo-Optik (Abundanz, Art-ID, Größenmessungen) sowie erhobene Daten der Umwelt-Sensoren (Temperatur, Salzgehalt, Chlorophyll, Strömungsgeschwindigkeit, Trübung etc.) werden in ein integriertes, neu aufgebautes Daten- und Informations-System mit online-Zugriff gespeist. Im Rahmen des Internationalen Rates für Meeresforschung ICES (z.B. für Bestandserfassung und Quotenberechnung), von HELCOM (für die Umsetzung der internationalen Meeres-Strategie-Rahmen-Richtlinie) oder der nationalen Wasser-Rahmen-Richtlinie, werden die Daten aufbereitet und zur Verfügung gestellt werden.
Zwischen 2019 und 2022 konzentrierte sich der Arbeitsablauf in insgesamt vier Arbeitspaketen auf Design und Entwicklung der drei UFO-Einheiten. Hierunter fällt die Integration der Hardware und die damit verbundene Software-Entwicklung sowie die Implementierung von opto-akustischen Sensoren und einer optimierten Energieversorgung. Dazu gehört auch die optimale Verarbeitung großer Datenmengen, die Verbesserung der opto-akustischen Mustererkennung für Fische und anderer mariner Organismen, die Optimierung der Wartungsintervalle und deren Durchführung sowie kontrollierte Experimente zur Wirksamkeit von UV-C-Bestrahlung als Antifouling-Tool für die optischen Einheiten. Zur Qualitätssicherung werden im Rahmen des Datenhandlings eine Reihe von Standardtests zur Sichererstellung internationaler Standards für ein integriertes Assessment der Fischbestände entwickelt und durchgeführt: Kalibration und Validierung der erfassten Daten, Konversion von 2D-Information in 3D-Information, wissenschaftlich adäquate Bewertung der Datenqualität und Bereitstellung adäquater Daten-Verarbeitungsmöglichkeiten. Nicht zuletzt fokussieren Projektmanagement und -koordination auf die technisch-administrative Verwaltung, den Einsatz moderner Kommunikations-Infrastruktur (zwei digitale interaktive Poster) zur Dissemination der Ergebnisse, die effektive Implementierung der Arbeitspakete sowie eine enge Zusammenarbeit zwischen den Partnern und die Sicherstellung der Projektziele.

Ergebnisse
Kernstück im Projekt ist die automatische Fischidentifikation und Größenklassifikation des aufgenommenen Datenmaterials von Kamera und Sonar auf Grundlage von KI-Algorithmen (automatische Mustererkennung). Abhängig von Tiefe und Sichtweite werden Fische im Nahfeld (Kamera) bis ca. 8-12 m und im Fernfeld (Sonar) bis ca. 200 m kontinuierlich aufgezeichnet.
Die Kombination (Hybridisierung) der Informationen aus Kamera und Sonar liefert:
- Detektion einzelner Fische (im Schwarm) und Artidentifikation
- Zählung aller Fische pro Zeiteinheit
- Größenklassifizierung einzelner Fische
- Biomasseberechnung pro Zeiteinheit
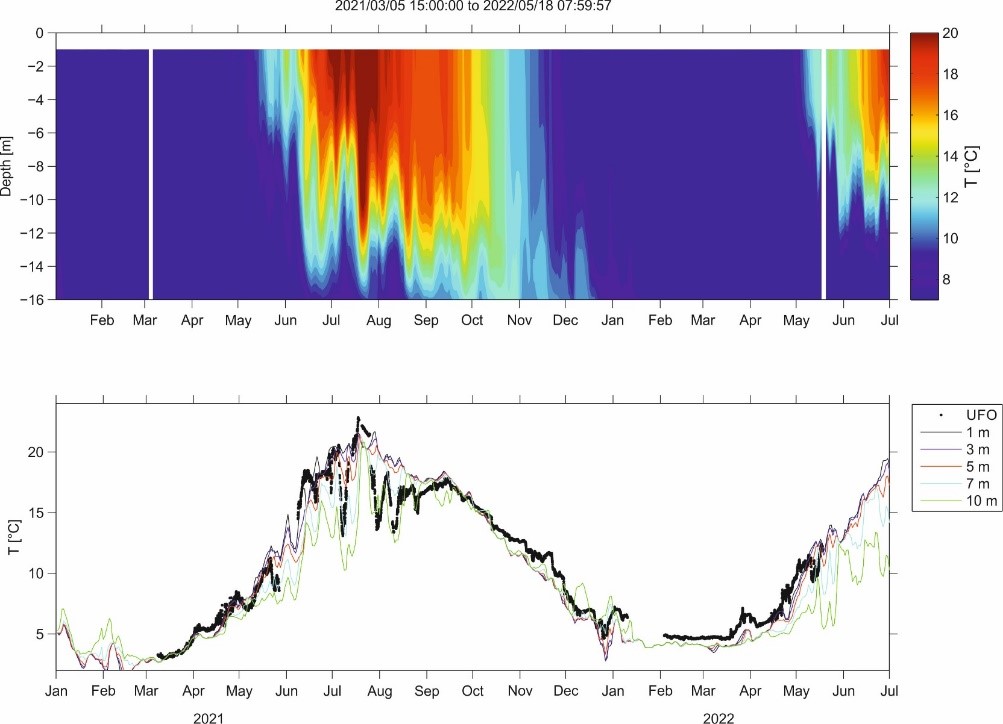
Begleitende Umweltparameter, wie z.B. Temperatur (unten dargestellt), Salzgehalt, Sauerstoff, Chlorophyllgehalt, Trübung und Strömungen werden direkt vom stationären UFO bzw. von anderen Messstationen gemessen. Der Vergleich dieser Daten mit der Fischdynamik liefert Aufschluss über kausale Zusammenhänge zur Dynamik ihrer Umgebung.
 Project brief: UFO-TRINETBoris Cisewski, Joachim Gröger, Sabah Badri-Hoeher, Gordon Böer, Karin Boos, Catriona Clemmesen, Verena Dauben, Andreas Lehmann, Sebastian Matz, Hela Mehrtens, Felix Mittermayer, Helge RenRenkewitz, Hauke Schramm, Tobias Strickmann, Jonni Westphalen, Thomas Wilts, Julian Winkler, Dennis Wolf and Oliver Zenk (2024): Entwicklung eines nicht-invasiven, opto-akustischen Unterwasser-Fischobservatoriums. Braunschweig: Johann Heinrich von Thünen-Institut, Project brief 2024/24, DOI: 10.3220/PB1730968626000
331 KB
Project brief: UFO-TRINETBoris Cisewski, Joachim Gröger, Sabah Badri-Hoeher, Gordon Böer, Karin Boos, Catriona Clemmesen, Verena Dauben, Andreas Lehmann, Sebastian Matz, Hela Mehrtens, Felix Mittermayer, Helge RenRenkewitz, Hauke Schramm, Tobias Strickmann, Jonni Westphalen, Thomas Wilts, Julian Winkler, Dennis Wolf and Oliver Zenk (2024): Entwicklung eines nicht-invasiven, opto-akustischen Unterwasser-Fischobservatoriums. Braunschweig: Johann Heinrich von Thünen-Institut, Project brief 2024/24, DOI: 10.3220/PB1730968626000
331 KB
Links und Downloads
- 06.2019: Projektbeginn, Bericht über die Förderung der Weiterentwicklung des „Unterwasser-Fisch-Observatoriums“ (UFO) durch das Bundesministerium für Ernährung und Landwirtschaft (BMEL) im Rahmen seines Innovationsförderprogramms (www.geomar.de/news/article/meeres-ufos-erkunden-die-lebensgemeinschaft-unter-wasser/)
- 05.2020: NDR-Beitrag im Anschluss an die Ausbringung des stationären UFOs in der Kieler Förde (https://www.ndr.de/nachrichten/schleswig-holstein/Fischbestand-der-Meere-Ein-UFO-soll-helfen,geomar274.html)
- 06.2021: Die Wiederausbringung des stationären UFOs nach Wartungsarbeiten wurde mit Filmaufnahmen und Interviews durch den NDR begleitet. Diese sind für eine Folge der NDR QUIZSHOW - Die Leuchte des Nordens mit Jörg Pilawa durchgeführt worden. Die Ausstrahlung soll im Laufe von 2022 erfolgen.
- 11.2021: „Leer gefischt? – Wie wir die Fische im Meer schützen können“, children‘s show „neun ½“ oft he WDR (https://kinder.wdr.de/tv/neuneinhalb/av/video-leer-gefischt--wie-wir-die-fische-im-meer-schuetzen-koennen-100.html
- Publikation: Böer G, Veeramalli R, Schramm H (2021) Segmentation of Fish in Realistic Underwater Scenes using Lightweight Deep Learning Models, ROBOVIS 2021: Computer Science, Environmental Science (https://www.semanticscholar.org/paper/Segmentation-of-Fish-in-Realistic-Underwater-Scenes-B%C3%B6er-Veeramalli/d36bc554bb0b39ff8ec420039899a4c842a10a2c)
- Publikation: Bouzouit A, Fietz D, Badri-Hoeher S (2021) Fish Tracking Based on Sonar Images by Means of a Modified Optical Flow, Proc. MTS/IEEE Oceans Conference (OCEANS '21), San Diego – Porto, September 2021 (https://ieeexplore.ieee.org/document/9705868)
- Publikation: Fietz D, Bouzaouit A, Badri-Hoeher S (2021) Background Noise Cancellation from Active Sonar Images Utilizing Transmission-free Recordings, Proc. MTS/IEEE Oceans Conference (OCEANS '21), San Diego – Porto, September 2021 (https://ieeexplore.ieee.org/document/9705811)
Thünen-Ansprechperson

Thünen-Beteiligte
Beteiligte externe Thünen-Partner
- GEOMAR - Helmholtz Zentrum für Ozeanforschung Kiel
(Kiel, Deutschland) -
Fraunhofer IOSB, Institutsteil Angewandte Systemtechnik (AST)
(Ilmenau, Deutschland) - Fachhochschule Kiel
(Kiel, Deutschland)
Geldgeber
-
Bundesministerium für Landwirtschaft, Ernährung und Heimat (BMLEH)
(national, öffentlich)
Zeitraum
5.2019 - 6.2023
Weitere Projektdaten
Projektfördernummer: 2819111518
Förderprogramm: Innovationsförderung
Projektstatus:
abgeschlossen




